Abstract asynchronous I2C Manager. More...
#include <fastarduino/i2c_handler_atmega.h>
Public Types | |
| using | ABSTRACT_FUTURE = future::AbstractFuture |
| The abstract base class of all futures to be defined for this I2C Manager. | |
| template<typename OUT , typename IN > | |
| using | FUTURE = future::Future< OUT, IN > |
| The template base class of all futures to be defined for this I2C Manager. | |
| using | I2CCOMMAND = I2CCommand< ABSTRACT_FUTURE > |
| The type of I2CCommand to use in the buffer passed to the constructor of this AbstractI2CAsyncManager. | |
Public Member Functions | |
| void | begin () |
| Prepare and enable the MCU for I2C transmission. | |
| void | end () |
| Disable MCU I2C transmission. | |
| void | begin_ () |
| Prepare and enable the MCU for I2C transmission. | |
| void | end_ () |
| Disable MCU I2C transmission. | |
Friends | |
| template<typename > | |
| class | I2CDevice |
| struct | isr_handler |
Detailed Description
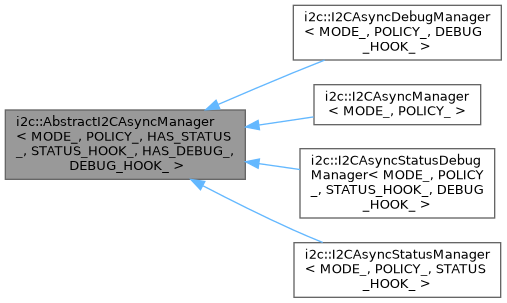
class i2c::AbstractI2CAsyncManager< MODE_, POLICY_, HAS_STATUS_, STATUS_HOOK_, HAS_DEBUG_, DEBUG_HOOK_ >
Abstract asynchronous I2C Manager.
It is specifically subclassed for ATmega architecture. You should never need to subclass AbstractI2CAsyncManager yourself.
- Template Parameters
-
MODE_ the I2C mode for this manager POLICY_ the policy to use in case of an error during I2C transaction HAS_STATUS_ tells this I2C Manager to call a status hook at each step of an I2C transaction; using falsewill generate smaller code.STATUS_HOOK_ the type of the hook to be called when HAS_STATUS_istrue. This can be a simple function pointer (of typeI2C_STATUS_HOOK) or a Functor class (or Functor class reference). Using a Functor class will generate smaller code.HAS_DEBUG_ tells this I2C Manager to call a debugging hook at each step of an I2C transaction; this is useful for debugging support for a new I2C device; using falsewill generate smaller code.DEBUG_HOOK_ the type of the hook to be called when IS_DEBUGistrue. This can be a simple function pointer (of typeI2C_DEBUG_HOOK) or a Functor class (or Functor class reference). Using a Functor class will generate smaller code.
Definition at line 358 of file i2c_handler_atmega.h.
Member Typedef Documentation
◆ ABSTRACT_FUTURE
| using i2c::AbstractI2CAsyncManager< MODE_, POLICY_, HAS_STATUS_, STATUS_HOOK_, HAS_DEBUG_, DEBUG_HOOK_ >::ABSTRACT_FUTURE = future::AbstractFuture |
The abstract base class of all futures to be defined for this I2C Manager.
For an asynchronous manager, it is always future::AbstractFuture.
Definition at line 373 of file i2c_handler_atmega.h.
◆ FUTURE
| using i2c::AbstractI2CAsyncManager< MODE_, POLICY_, HAS_STATUS_, STATUS_HOOK_, HAS_DEBUG_, DEBUG_HOOK_ >::FUTURE = future::Future<OUT, IN> |
The template base class of all futures to be defined for this I2C Manager.
For an asynchronous manager, it is always future::Future.
Definition at line 379 of file i2c_handler_atmega.h.
◆ I2CCOMMAND
| using i2c::AbstractI2CAsyncManager< MODE_, POLICY_, HAS_STATUS_, STATUS_HOOK_, HAS_DEBUG_, DEBUG_HOOK_ >::I2CCOMMAND = I2CCommand<ABSTRACT_FUTURE> |
The type of I2CCommand to use in the buffer passed to the constructor of this AbstractI2CAsyncManager.
Definition at line 385 of file i2c_handler_atmega.h.
Member Function Documentation
◆ begin()
|
inline |
Prepare and enable the MCU for I2C transmission.
Preparation includes setup of I2C pins (SDA and SCL). This method is synchronized.
Definition at line 394 of file i2c_handler_atmega.h.
◆ end()
|
inline |
Disable MCU I2C transmission.
This method is synchronized.
Definition at line 405 of file i2c_handler_atmega.h.
◆ begin_()
|
inline |
Prepare and enable the MCU for I2C transmission.
Preparation includes setup of I2C pins (SDA and SCL). This method is NOT synchronized.
Definition at line 417 of file i2c_handler_atmega.h.
◆ end_()
|
inline |
Disable MCU I2C transmission.
This method is NOT synchronized.
Definition at line 434 of file i2c_handler_atmega.h.
Friends And Related Symbol Documentation
◆ I2CDevice
|
friend |
Definition at line 748 of file i2c_handler_atmega.h.
◆ isr_handler
|
friend |
Definition at line 749 of file i2c_handler_atmega.h.
The documentation for this class was generated from the following file:
- fastarduino/i2c_handler_atmega.h