API to handle EEPROM access in read and write modes. More...
#include "boards/board_traits.h"#include <avr/interrupt.h>#include <avr/eeprom.h>#include "interrupts.h"#include "utilities.h"#include "queue.h"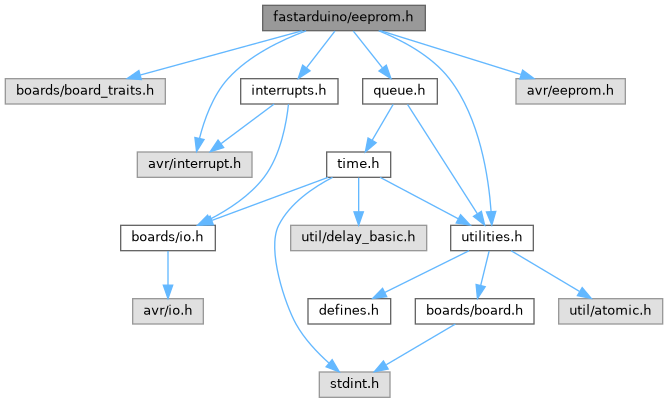
Go to the source code of this file.
Classes | |
| class | eeprom::EEPROM |
| Collection of static methods to read or write the AVR EEPROM. More... | |
| class | eeprom::QueuedWriter |
| API that allows asynchronous writing to EEPROM; this can be useful when you have large amount of data to write but cannot afford to wait until all bytes have been written. More... | |
Namespaces | |
| namespace | eeprom |
| Defines the API for accessing the EEPROM embedded in each AVR MCU. | |
Macros | |
| #define | REGISTER_EEPROM_ISR() |
| Register the necessary ISR (Interrupt Service Routine) for eeprom::QueuedWriter to work properly. | |
| #define | REGISTER_EEPROM_ISR_METHOD(HANDLER, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for eeprom::QueuedWriter to work properly, along with a callback method that will be called everytime all pending queued write operations are complete. | |
| #define | REGISTER_EEPROM_ISR_FUNCTION(CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for eeprom::QueuedWriter to work properly, along with a callback method that will be called everytime all pending queued write operations are complete. | |
| #define | DECL_EEPROM_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_EEPROM_ISR_METHOD. | |
Detailed Description
API to handle EEPROM access in read and write modes.
Definition in file eeprom.h.
Macro Definition Documentation
◆ REGISTER_EEPROM_ISR
| #define REGISTER_EEPROM_ISR | ( | ) |
Register the necessary ISR (Interrupt Service Routine) for eeprom::QueuedWriter to work properly.
- See also
- eeprom::QueuedWriter
◆ REGISTER_EEPROM_ISR_METHOD
| #define REGISTER_EEPROM_ISR_METHOD | ( | HANDLER, | |
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for eeprom::QueuedWriter to work properly, along with a callback method that will be called everytime all pending queued write operations are complete.
- Parameters
-
HANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when the interrupt is triggered; this must be a proper PTMF (pointer to member function).
- See also
- eeprom::QueuedWriter
◆ REGISTER_EEPROM_ISR_FUNCTION
| #define REGISTER_EEPROM_ISR_FUNCTION | ( | CALLBACK | ) |
Register the necessary ISR (Interrupt Service Routine) for eeprom::QueuedWriter to work properly, along with a callback method that will be called everytime all pending queued write operations are complete.
- Parameters
-
CALLBACK the function that will be called when the interrupt is triggered
- See also
- eeprom::QueuedWriter
◆ DECL_EEPROM_ISR_HANDLERS_FRIEND
| #define DECL_EEPROM_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_EEPROM_ISR_METHOD.
It declares the class where it is used as a friend of all necessary functions so that the private callback method can be called properly.