PulseTimer API. More...
#include "boards/board_traits.h"#include <avr/interrupt.h>#include <stddef.h>#include "interrupts.h"#include "utilities.h"#include "timer.h"#include "gpio.h"#include "types_traits.h"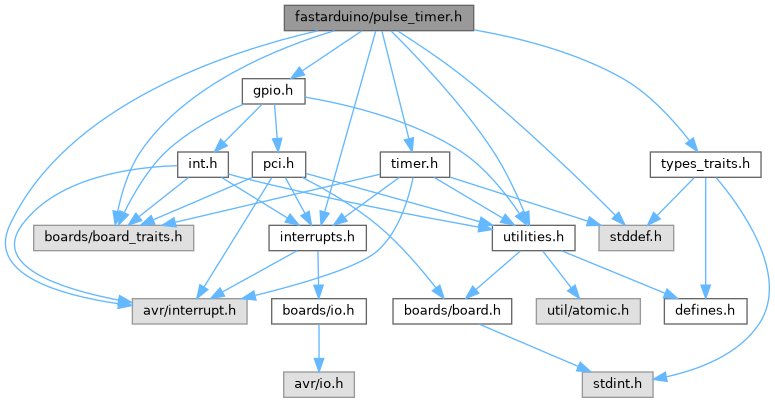
Go to the source code of this file.
Classes | |
| class | timer::PulseTimer< NTIMER_, PRESCALER_, T > |
Special kind of timer::Timer, specialized in emitting pulses with accurate width, according to a slow frequency. More... | |
Namespaces | |
| namespace | timer |
| Defines all API to manipulate AVR Timers. | |
Macros | |
| #define | REGISTER_PULSE_TIMER8_AB_ISR(TIMER_NUM, PRESCALER, PIN_A, PIN_B) |
| Register all necessary ISR (Tnterrupt Service Routines) for a timer::PulseTimer to work properly, when both its PWM pins are connected. | |
| #define | REGISTER_PULSE_TIMER8_A_ISR(TIMER_NUM, PRESCALER, PIN_A) |
| Register all necessary ISR (Tnterrupt Service Routines) for a timer::PulseTimer to work properly, when only its first PWM pins is connected. | |
| #define | REGISTER_PULSE_TIMER8_B_ISR(TIMER_NUM, PRESCALER, PIN_B) |
| Register all necessary ISR (Tnterrupt Service Routines) for a timer::PulseTimer to work properly, when only its second PWM pins is connected. | |
Detailed Description
PulseTimer API.
Definition in file pulse_timer.h.
Macro Definition Documentation
◆ REGISTER_PULSE_TIMER8_AB_ISR
| #define REGISTER_PULSE_TIMER8_AB_ISR | ( | TIMER_NUM, | |
| PRESCALER, | |||
| PIN_A, | |||
| PIN_B | |||
| ) |
Register all necessary ISR (Tnterrupt Service Routines) for a timer::PulseTimer to work properly, when both its PWM pins are connected.
Note: this is necessary only for PulseTimer based on an 8-bits Timer. If you are using a 16-bits based PulseTimer, then you don't need to use this macro.
- Parameters
-
TIMER_NUM the timer number (as defined in MCU datasheet) PRESCALER the prescaler value used to instantiate the PulseTimer template PIN_A the board::PWMPin connected to first PWM pin of the PulseTimer; this is used for control only, to avoid bugs due to code typos. PIN_B the board::PWMPin connected to second PWM pin of the PulseTimer; this is used for control only, to avoid bugs due to code typos.
- See also
- timer::PulseTimer
Definition at line 51 of file pulse_timer.h.
◆ REGISTER_PULSE_TIMER8_A_ISR
| #define REGISTER_PULSE_TIMER8_A_ISR | ( | TIMER_NUM, | |
| PRESCALER, | |||
| PIN_A | |||
| ) |
Register all necessary ISR (Tnterrupt Service Routines) for a timer::PulseTimer to work properly, when only its first PWM pins is connected.
Note: this is necessary only for PulseTimer based on an 8-bits Timer. If you are using a 16-bits based PulseTimer, then you don't need to use this macro.
- Parameters
-
TIMER_NUM the timer number (as defined in MCU datasheet) PRESCALER the prescaler value used to instantiate the PulseTimer template PIN_A the board::PWMPin connected to first PWM pin of the PulseTimer; this is used for control only, to avoid bugs due to code typos.
- See also
- timer::PulseTimer
Definition at line 79 of file pulse_timer.h.
◆ REGISTER_PULSE_TIMER8_B_ISR
| #define REGISTER_PULSE_TIMER8_B_ISR | ( | TIMER_NUM, | |
| PRESCALER, | |||
| PIN_B | |||
| ) |
Register all necessary ISR (Tnterrupt Service Routines) for a timer::PulseTimer to work properly, when only its second PWM pins is connected.
Note: this is necessary only for PulseTimer based on an 8-bits Timer. If you are using a 16-bits based PulseTimer, then you don't need to use this macro.
- Parameters
-
TIMER_NUM the timer number (as defined in MCU datasheet) PRESCALER the prescaler value used to instantiate the PulseTimer template PIN_B the board::PWMPin connected to second PWM pin of the PulseTimer; this is used for control only, to avoid bugs due to code typos.
- See also
- timer::PulseTimer
Definition at line 104 of file pulse_timer.h.