Real-time Timer API. More...
#include "boards/io.h"#include <avr/interrupt.h>#include "interrupts.h"#include "timer.h"#include "time.h"#include "events.h"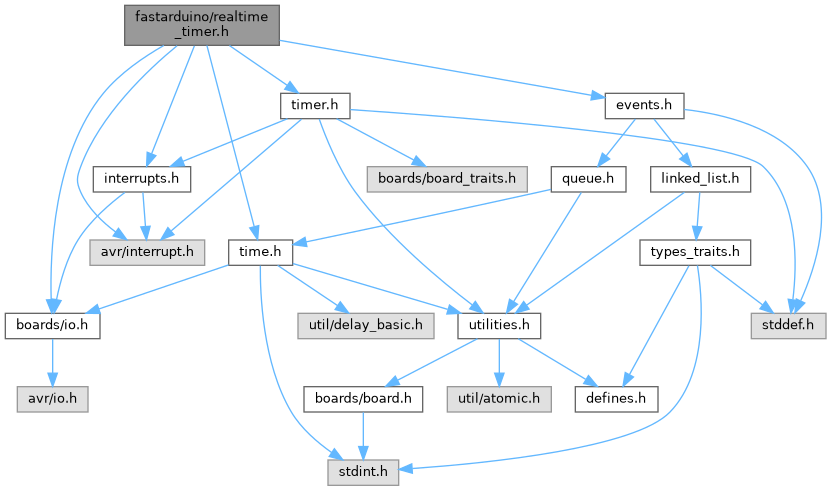
Go to the source code of this file.
Classes | |
| class | timer::RTTRawTime< T > |
Utility class to avoid costly instantiation of time::RTTTime from an interrupt routine. More... | |
| class | timer::RTT< NTIMER_ > |
| API to handle a real-time timer. More... | |
| class | timer::RTTEventCallback< EVENT, PERIOD_MS > |
Utility to generate events from an RTT instance at a given period. More... | |
Namespaces | |
| namespace | timer |
| Defines all API to manipulate AVR Timers. | |
Macros | |
| #define | REGISTER_RTT_ISR(TIMER_NUM) |
| Register the necessary ISR (Interrupt Service Routine) for a timer::RTT to work properly. | |
| #define | REGISTER_RTT_ISR_METHOD(TIMER_NUM, HANDLER, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for a timer::RTT to work properly, along with a callback method that will be notified every millisecond. | |
| #define | REGISTER_RTT_ISR_FUNCTION(TIMER_NUM, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for a timer::RTT to work properly, along with a callback function that will be notified every millisecond. | |
| #define | REGISTER_RTT_EVENT_ISR(TIMER_NUM, EVENT, PERIOD) |
| Register the necessary ISR (Interrupt Service Routine) for a timer::RTT to work properly, along with a callback to timer::RTTEventCallback. | |
| #define | DECL_RTT_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_RTT_ISR_METHOD. | |
Detailed Description
Real-time Timer API.
Definition in file realtime_timer.h.
Macro Definition Documentation
◆ REGISTER_RTT_ISR
| #define REGISTER_RTT_ISR | ( | TIMER_NUM | ) |
Register the necessary ISR (Interrupt Service Routine) for a timer::RTT to work properly.
This will not register any user callback though; if you need to register a method or function to be called back every time one millsiecond has elapsed, you need to use REGISTER_RTT_ISR_METHOD or REGISTER_RTT_ISR_FUNCTION instead.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU
Definition at line 44 of file realtime_timer.h.
◆ REGISTER_RTT_ISR_METHOD
| #define REGISTER_RTT_ISR_METHOD | ( | TIMER_NUM, | |
| HANDLER, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a timer::RTT to work properly, along with a callback method that will be notified every millisecond.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU HANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when the interrupt is triggered; this must be a proper PTMF (pointer to member function) that takes anuint32_targument that will receive the total number of milliseconds elapsed since the RTT has started.
Definition at line 64 of file realtime_timer.h.
◆ REGISTER_RTT_ISR_FUNCTION
| #define REGISTER_RTT_ISR_FUNCTION | ( | TIMER_NUM, | |
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a timer::RTT to work properly, along with a callback function that will be notified every millisecond.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU CALLBACK the function that will be called when the interrupt is triggered; this function must accept an uint32_targument that will receive the total number of milliseconds elapsed since the RTT has started.
Definition at line 82 of file realtime_timer.h.
◆ REGISTER_RTT_EVENT_ISR
| #define REGISTER_RTT_EVENT_ISR | ( | TIMER_NUM, | |
| EVENT, | |||
| PERIOD | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a timer::RTT to work properly, along with a callback to timer::RTTEventCallback.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU EVENT the events::Event<T>type to be generated by RTTEventCallbackPERIOD the period, in ms, at which RTTEventCallback will generate events; this must be a power of 2.
NOTE: it is important that EVENT and PERIOD match an RTTEventCallback<EVENT, PERIOD> instance in your code.
- See also
- RTTEventCallback
Definition at line 102 of file realtime_timer.h.
◆ DECL_RTT_ISR_HANDLERS_FRIEND
| #define DECL_RTT_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_RTT_ISR_METHOD.
It declares the class where it is used as a friend of all necessary functions so that the private callback method can be called properly.
Definition at line 114 of file realtime_timer.h.