Software-emulated serial API. More...
#include "boards/board.h"#include "interrupts.h"#include "utilities.h"#include "uart_commons.h"#include "streams.h"#include "gpio.h"#include "pci.h"#include "int.h"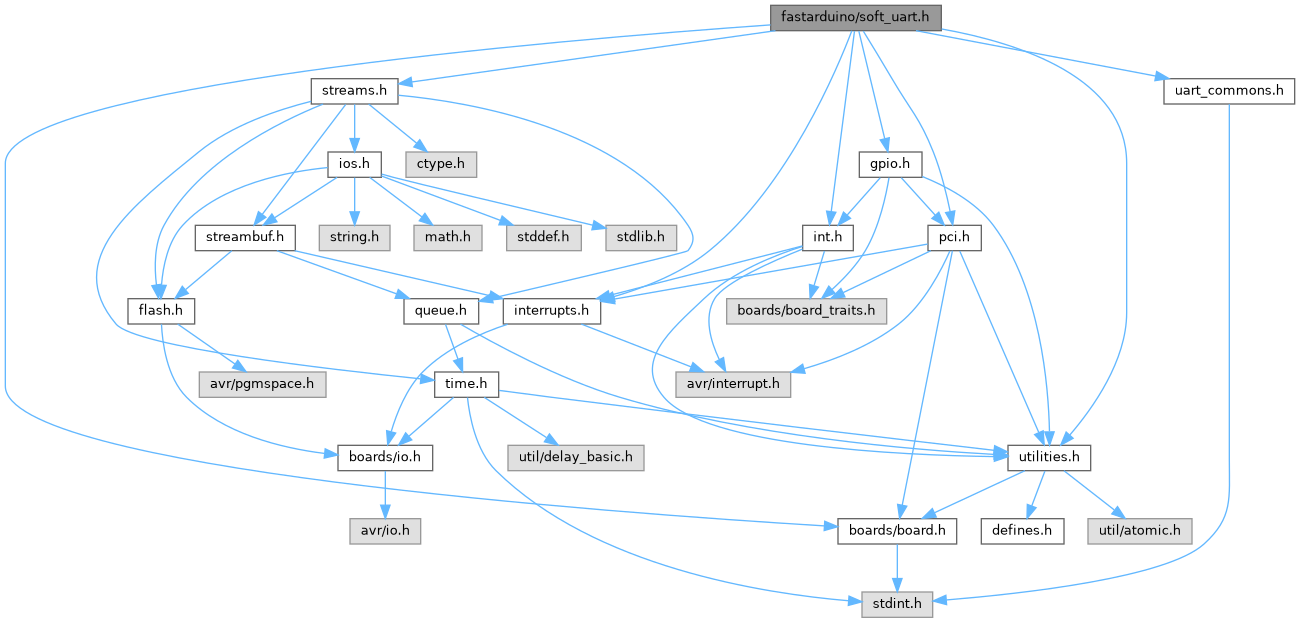
Go to the source code of this file.
Classes | |
| class | serial::soft::UATX< TX_ > |
| Software-emulated serial transmitter API. More... | |
| class | serial::soft::UARX< board::ExternalInterruptPin, RX_ > |
| class | serial::soft::UART< board::ExternalInterruptPin, RX_, TX_ > |
| class | serial::soft::UARX< board::InterruptPin, RX_ > |
| class | serial::soft::UART< board::InterruptPin, RX_, TX_ > |
Namespaces | |
| namespace | serial |
| Defines all API for UART features. | |
| namespace | serial::soft |
| Defines API types used by software UART features. | |
Macros | |
| #define | REGISTER_UARX_PCI_ISR(RX, PCI_NUM) |
| Register the necessary ISR (Interrupt Service Routine) for an serial::soft::UARX to work correctly. | |
| #define | REGISTER_UARX_INT_ISR(RX, INT_NUM) |
| Register the necessary ISR (Interrupt Service Routine) for an serial::soft::UARX to work correctly. | |
| #define | REGISTER_UART_PCI_ISR(RX, TX, PCI_NUM) |
| Register the necessary ISR (Interrupt Service Routine) for an serial::soft::UART to work correctly. | |
| #define | REGISTER_UART_INT_ISR(RX, TX, INT_NUM) |
| Register the necessary ISR (Interrupt Service Routine) for an serial::soft::UART to work correctly. | |
Typedefs | |
| template<board::ExternalInterruptPin RX_> | |
| using | serial::soft::UARX_EXT = UARX< board::ExternalInterruptPin, RX_ > |
| Software-emulated serial receiver API. | |
| template<board::InterruptPin RX_> | |
| using | serial::soft::UARX_PCI = UARX< board::InterruptPin, RX_ > |
| Software-emulated serial receiver API. | |
| template<board::ExternalInterruptPin RX_, board::DigitalPin TX_> | |
| using | serial::soft::UART_EXT = UART< board::ExternalInterruptPin, RX_, TX_ > |
| Software-emulated serial receiver/transceiver API. | |
| template<board::InterruptPin RX_, board::DigitalPin TX_> | |
| using | serial::soft::UART_PCI = UART< board::InterruptPin, RX_, TX_ > |
| Software-emulated serial receiver/transceiver API. | |
Detailed Description
Software-emulated serial API.
Definition in file soft_uart.h.
Macro Definition Documentation
◆ REGISTER_UARX_PCI_ISR
| #define REGISTER_UARX_PCI_ISR | ( | RX, | |
| PCI_NUM | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for an serial::soft::UARX to work correctly.
This applies to an UARX which RX pin is a PCINT pin.
- Parameters
-
RX the board::InterruptPinused as RX for the UARXPCI_NUM the number of the PCINTvector for the givenRXpin
Definition at line 39 of file soft_uart.h.
◆ REGISTER_UARX_INT_ISR
| #define REGISTER_UARX_INT_ISR | ( | RX, | |
| INT_NUM | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for an serial::soft::UARX to work correctly.
This applies to an UARX which RX pin is an External INT pin.
- Parameters
-
RX the board::ExternalInterruptPinused as RX for the UARXINT_NUM the number of the INTvector for the givenRXpin
Definition at line 51 of file soft_uart.h.
◆ REGISTER_UART_PCI_ISR
| #define REGISTER_UART_PCI_ISR | ( | RX, | |
| TX, | |||
| PCI_NUM | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for an serial::soft::UART to work correctly.
This applies to an UART which RX pin is a PCINT pin.
- Parameters
-
RX the board::InterruptPinused as RX for the UARTTX the board::DigitalPinused as TX for the UARTPCI_NUM the number of the PCINTvector for the givenRXpin
Definition at line 64 of file soft_uart.h.
◆ REGISTER_UART_INT_ISR
| #define REGISTER_UART_INT_ISR | ( | RX, | |
| TX, | |||
| INT_NUM | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for an serial::soft::UART to work correctly.
This applies to an UART which RX pin is an External INT pin.
- Parameters
-
RX the board::ExternalInterruptPinused as RX for the UARTTX the board::DigitalPinused as TX for the UARTINT_NUM the number of the INTvector for the givenRXpin
Definition at line 77 of file soft_uart.h.