Timer API. More...
#include "boards/board_traits.h"#include <avr/interrupt.h>#include <stddef.h>#include "interrupts.h"#include "utilities.h"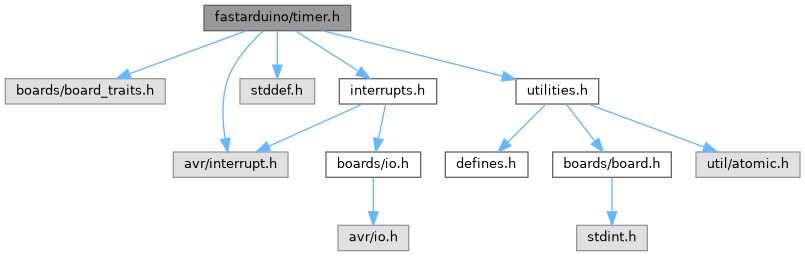
Go to the source code of this file.
Classes | |
| struct | timer::Calculator< NTIMER_ > |
Defines a set of calculation methods for the given NTIMER_ The behavior of these methods is specific to each AVR Timer are there can be many important differences between 2 timers on AVR. More... | |
| class | timer::Timer< NTIMER_ > |
| General API to handle an AVR timer. More... | |
Namespaces | |
| namespace | timer |
| Defines all API to manipulate AVR Timers. | |
Macros | |
| #define | REGISTER_TIMER_COMPARE_ISR_METHOD(TIMER_NUM, HANDLER, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for a timer::Timer with a callback method in CTC mode. | |
| #define | REGISTER_TIMER_COMPARE_ISR_FUNCTION(TIMER_NUM, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for a timer::Timer with a callback function in CTC mode. | |
| #define | REGISTER_TIMER_COMPARE_ISR_EMPTY(TIMER_NUM) |
| Register an empty ISR (Interrupt Service Routine) for a timer::Timer. | |
| #define | REGISTER_TIMER_OVERFLOW_ISR_METHOD(TIMER_NUM, HANDLER, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for the Counter Overflow of a timer::Timer. | |
| #define | REGISTER_TIMER_OVERFLOW_ISR_FUNCTION(TIMER_NUM, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for the Counter Overflow of a timer::Timer. | |
| #define | REGISTER_TIMER_OVERFLOW_ISR_EMPTY(TIMER_NUM) |
| Register an empty ISR (Interrupt Service Routine) for the Counter Overflow of a timer::Timer. | |
| #define | REGISTER_TIMER_CAPTURE_ISR_METHOD(TIMER_NUM, HANDLER, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for the Input Capture of a timer::Timer. | |
| #define | REGISTER_TIMER_CAPTURE_ISR_FUNCTION(TIMER_NUM, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for the Input Capture of a timer::Timer. | |
| #define | REGISTER_TIMER_CAPTURE_ISR_EMPTY(TIMER_NUM) |
| Register an empty ISR (Interrupt Service Routine) for the Input Capture of a timer::Timer. | |
| #define | DECL_TIMER_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_TIMER_COMPARE_ISR_METHOD, REGISTER_TIMER_OVERFLOW_ISR_METHOD or REGISTER_TIMER_CAPTURE_ISR_METHOD. | |
Enumerations | |
| enum class | timer::TimerMode : uint8_t { timer::NORMAL , timer::CTC , timer::FAST_PWM , timer::PHASE_CORRECT_PWM } |
| Defines the mode of operation of a timer. More... | |
| enum class | timer::TimerInterrupt : uint8_t { timer::OVERFLOW = board_traits::TimerInterrupt::OVERFLOW , timer::OUTPUT_COMPARE_A = board_traits::TimerInterrupt::OUTPUT_COMPARE_A , timer::OUTPUT_COMPARE_B = board_traits::TimerInterrupt::OUTPUT_COMPARE_B , timer::OUTPUT_COMPARE_C = board_traits::TimerInterrupt::OUTPUT_COMPARE_C , timer::INPUT_CAPTURE = board_traits::TimerInterrupt::INPUT_CAPTURE } |
| Defines the interrupts that can be handled by a timer. More... | |
| enum class | timer::TimerOutputMode : uint8_t { timer::DISCONNECTED , timer::TOGGLE , timer::NON_INVERTING , timer::INVERTING } |
| Defines the "connection" between this timer and specific PWM output pins. More... | |
| enum class | timer::TimerInputCapture : uint8_t { timer::RISING_EDGE , timer::FALLING_EDGE } |
| Defines the type of input capture we want for a timer. More... | |
Functions | |
| constexpr TimerInterrupt | timer::operator| (TimerInterrupt i1, TimerInterrupt i2) |
Combine 2 timer interrupts for use with Timer.set_interrupts(). | |
Detailed Description
Timer API.
Definition in file timer.h.
Macro Definition Documentation
◆ REGISTER_TIMER_COMPARE_ISR_METHOD
| #define REGISTER_TIMER_COMPARE_ISR_METHOD | ( | TIMER_NUM, | |
| HANDLER, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a timer::Timer with a callback method in CTC mode.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU HANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when the interrupt is triggered; this must be a proper PTMF (pointer to member function).
◆ REGISTER_TIMER_COMPARE_ISR_FUNCTION
| #define REGISTER_TIMER_COMPARE_ISR_FUNCTION | ( | TIMER_NUM, | |
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a timer::Timer with a callback function in CTC mode.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU CALLBACK the function that will be called when the interrupt is triggered
◆ REGISTER_TIMER_COMPARE_ISR_EMPTY
| #define REGISTER_TIMER_COMPARE_ISR_EMPTY | ( | TIMER_NUM | ) |
Register an empty ISR (Interrupt Service Routine) for a timer::Timer.
This may be needed when using timer CTC mode but when you don't need any callback.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU
◆ REGISTER_TIMER_OVERFLOW_ISR_METHOD
| #define REGISTER_TIMER_OVERFLOW_ISR_METHOD | ( | TIMER_NUM, | |
| HANDLER, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for the Counter Overflow of a timer::Timer.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU HANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when the interrupt is triggered; this must be a proper PTMF (pointer to member function).
◆ REGISTER_TIMER_OVERFLOW_ISR_FUNCTION
| #define REGISTER_TIMER_OVERFLOW_ISR_FUNCTION | ( | TIMER_NUM, | |
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for the Counter Overflow of a timer::Timer.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU CALLBACK the function that will be called when the interrupt is triggered
◆ REGISTER_TIMER_OVERFLOW_ISR_EMPTY
| #define REGISTER_TIMER_OVERFLOW_ISR_EMPTY | ( | TIMER_NUM | ) |
Register an empty ISR (Interrupt Service Routine) for the Counter Overflow of a timer::Timer.
This would normally not be needed.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU
◆ REGISTER_TIMER_CAPTURE_ISR_METHOD
| #define REGISTER_TIMER_CAPTURE_ISR_METHOD | ( | TIMER_NUM, | |
| HANDLER, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for the Input Capture of a timer::Timer.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU HANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when the interrupt is triggered; this must be a proper PTMF (pointer to member function).
◆ REGISTER_TIMER_CAPTURE_ISR_FUNCTION
| #define REGISTER_TIMER_CAPTURE_ISR_FUNCTION | ( | TIMER_NUM, | |
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for the Input Capture of a timer::Timer.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU CALLBACK the function that will be called when the interrupt is triggered
◆ REGISTER_TIMER_CAPTURE_ISR_EMPTY
| #define REGISTER_TIMER_CAPTURE_ISR_EMPTY | ( | TIMER_NUM | ) |
Register an empty ISR (Interrupt Service Routine) for the Input Capture of a timer::Timer.
This would normally not be needed.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU
◆ DECL_TIMER_ISR_HANDLERS_FRIEND
| #define DECL_TIMER_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_TIMER_COMPARE_ISR_METHOD, REGISTER_TIMER_OVERFLOW_ISR_METHOD or REGISTER_TIMER_CAPTURE_ISR_METHOD.
It declares the class where it is used as a friend of all necessary functions so that the private callback method can be called properly.