Loading...
Searching...
No Matches
uart.h File Reference
Hardware serial API. More...
#include "boards/board_traits.h"#include "interrupts.h"#include "uart_commons.h"#include "streams.h"
Include dependency graph for uart.h:
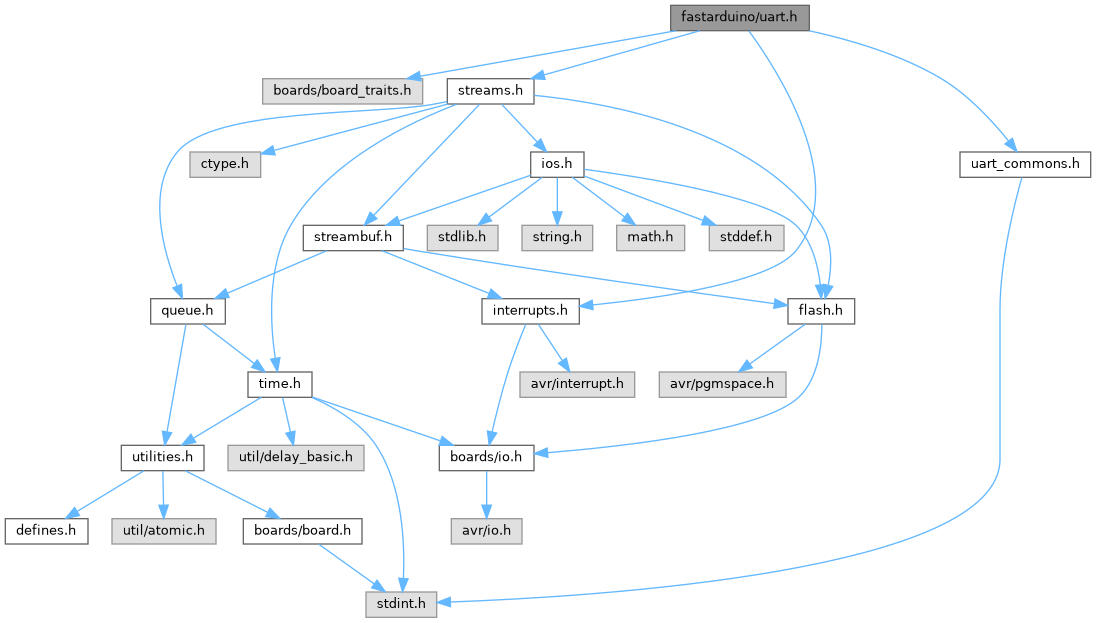
Go to the source code of this file.
Classes | |
| class | serial::hard::UATX< USART_ > |
| Hardware serial transmitter API. More... | |
| class | serial::hard::UARX< USART_ > |
| Hardware serial receiver API. More... | |
| class | serial::hard::UART< USART_ > |
| Hardware serial receiver/transceiver API. More... | |
Namespaces | |
| namespace | serial |
| Defines all API for UART features. | |
| namespace | serial::hard |
| Defines API types used by hardware UART features. | |
Macros | |
| #define | REGISTER_UATX_ISR(UART_NUM) |
| Register the necessary ISR (Interrupt Service Routine) for an serial::hard::UATX to work correctly. | |
| #define | REGISTER_UARX_ISR(UART_NUM) |
| Register the necessary ISR (Interrupt Service Routine) for an serial::hard::UARX to work correctly. | |
| #define | REGISTER_UART_ISR(UART_NUM) |
| Register the necessary ISR (Interrupt Service Routine) for an serial::hard::UART to work correctly. | |
Detailed Description
Hardware serial API.
Definition in file uart.h.
Macro Definition Documentation
◆ REGISTER_UATX_ISR
| #define REGISTER_UATX_ISR | ( | UART_NUM | ) |
Value:
ISR(CAT3(USART, UART_NUM, _UDRE_vect)) \
{ \
serial::hard::isr_handler::uatx<UART_NUM>(); \
}
Register the necessary ISR (Interrupt Service Routine) for an serial::hard::UATX to work correctly.
- Parameters
-
UART_NUM the number of the USART feature for the target MCU
◆ REGISTER_UARX_ISR
| #define REGISTER_UARX_ISR | ( | UART_NUM | ) |
Value:
ISR(CAT3(USART, UART_NUM, _RX_vect)) \
{ \
serial::hard::isr_handler::uarx<UART_NUM>(); \
}
Register the necessary ISR (Interrupt Service Routine) for an serial::hard::UARX to work correctly.
- Parameters
-
UART_NUM the number of the USART feature for the target MCU
◆ REGISTER_UART_ISR
| #define REGISTER_UART_ISR | ( | UART_NUM | ) |
Value:
ISR(CAT3(USART, UART_NUM, _UDRE_vect)) \
{ \
serial::hard::isr_handler::uart_tx<UART_NUM>(); \
} \
\
ISR(CAT3(USART, UART_NUM, _RX_vect)) \
{ \
serial::hard::isr_handler::uart_rx<UART_NUM>(); \
}
Register the necessary ISR (Interrupt Service Routine) for an serial::hard::UART to work correctly.
- Parameters
-
UART_NUM the number of the USART feature for the target MCU