Watchdog API. More...
#include "boards/board.h"#include "boards/board_traits.h"#include <avr/interrupt.h>#include "interrupts.h"#include "events.h"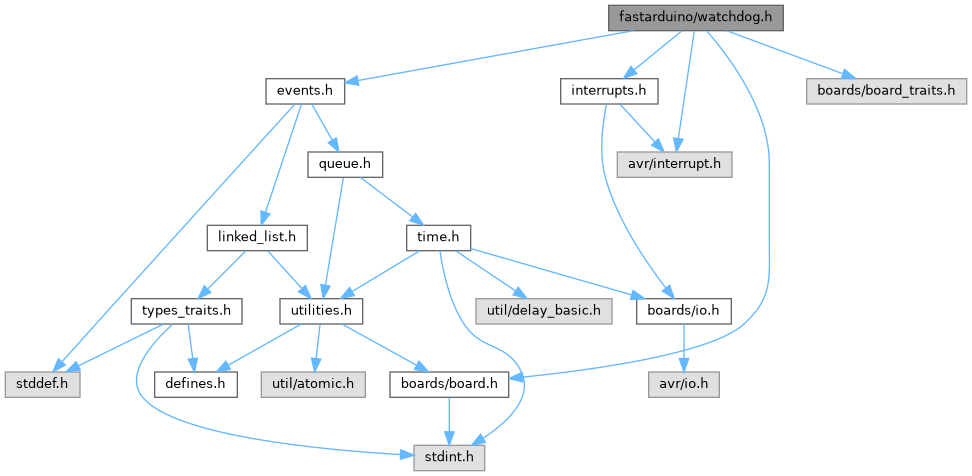
Go to the source code of this file.
Classes | |
| class | watchdog::WatchdogSignal |
| Simple API to handle watchdog signals. More... | |
| class | watchdog::WatchdogRTT |
| Simple API to use watchdog timer as a real-time clock. More... | |
| class | watchdog::Watchdog< EVENT > |
| Simple API to use watchdog timer as a clock for events generation. More... | |
Namespaces | |
| namespace | watchdog |
| Defines the simple API for Watchdog timer management. | |
Macros | |
| #define | REGISTER_WATCHDOG_CLOCK_ISR(EVENT) |
| Register the necessary ISR (Interrupt Service Routine) for a watchdog::Watchdog to work properly. More... | |
| #define | REGISTER_WATCHDOG_RTT_ISR() |
| Register the necessary ISR (Interrupt Service Routine) for a watchdog::WatchdogRTT to work properly. More... | |
| #define | REGISTER_WATCHDOG_ISR_METHOD(HANDLER, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) with a callback method that will be called every time a watchdog timeout occurs, according to how watchdog::WatchdogSignal was started. More... | |
| #define | REGISTER_WATCHDOG_ISR_FUNCTION(CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) with a callback function that will be called every time a watchdog timeout occurs, according to how watchdog::WatchdogSignal was started. More... | |
| #define | REGISTER_WATCHDOG_ISR_EMPTY() EMPTY_INTERRUPT(WDT_vect) |
| Register an empty ISR (Interrupt Service Routine) for a watchdog::WatchdogSignal. More... | |
| #define | DECL_WATCHDOG_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_WATCHDOG_ISR_METHOD. More... | |
Enumerations | |
| enum class | watchdog::TimeOut : uint8_t { watchdog::TO_16ms = 0 , watchdog::TO_32ms , watchdog::TO_64ms , watchdog::TO_125ms , watchdog::TO_250ms , watchdog::TO_500ms , watchdog::TO_1s , watchdog::TO_2s , watchdog::TO_4s , watchdog::TO_8s } |
| Defines the watchdog timeout period; watchdog interrupts will be triggered at the selected period. More... | |
Detailed Description
Watchdog API.
Definition in file watchdog.h.
Macro Definition Documentation
◆ REGISTER_WATCHDOG_CLOCK_ISR
| #define REGISTER_WATCHDOG_CLOCK_ISR | ( | EVENT | ) |
Register the necessary ISR (Interrupt Service Routine) for a watchdog::Watchdog to work properly.
- Parameters
-
EVENT the type of Event<T> to be generated by the watchdog
- See also
- watchdog::Watchdog
Definition at line 36 of file watchdog.h.
◆ REGISTER_WATCHDOG_RTT_ISR
| #define REGISTER_WATCHDOG_RTT_ISR | ( | ) |
Register the necessary ISR (Interrupt Service Routine) for a watchdog::WatchdogRTT to work properly.
- See also
- watchdog::WatchdogRTT
Definition at line 47 of file watchdog.h.
◆ REGISTER_WATCHDOG_ISR_METHOD
| #define REGISTER_WATCHDOG_ISR_METHOD | ( | HANDLER, | |
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) with a callback method that will be called every time a watchdog timeout occurs, according to how watchdog::WatchdogSignal was started.
- Parameters
-
HANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when the interrupt is triggered; this must be a proper PTMF (pointer to member function).
Definition at line 61 of file watchdog.h.
◆ REGISTER_WATCHDOG_ISR_FUNCTION
| #define REGISTER_WATCHDOG_ISR_FUNCTION | ( | CALLBACK | ) |
Register the necessary ISR (Interrupt Service Routine) with a callback function that will be called every time a watchdog timeout occurs, according to how watchdog::WatchdogSignal was started.
- Parameters
-
CALLBACK the function that will be called when the interrupt is triggered
Definition at line 74 of file watchdog.h.
◆ REGISTER_WATCHDOG_ISR_EMPTY
| #define REGISTER_WATCHDOG_ISR_EMPTY | ( | ) | EMPTY_INTERRUPT(WDT_vect) |
Register an empty ISR (Interrupt Service Routine) for a watchdog::WatchdogSignal.
This may be needed when using watchdog just to awaken a sleeping MCU, but without any necessary immediate callback.
Definition at line 85 of file watchdog.h.
◆ DECL_WATCHDOG_ISR_HANDLERS_FRIEND
| #define DECL_WATCHDOG_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_WATCHDOG_ISR_METHOD.
It declares the class where it is used as a friend of all necessary functions so that the private callback method can be called properly.
Definition at line 93 of file watchdog.h.