General API for handling External Interrupt pins. More...
#include "boards/board_traits.h"#include <avr/interrupt.h>#include "interrupts.h"#include "utilities.h"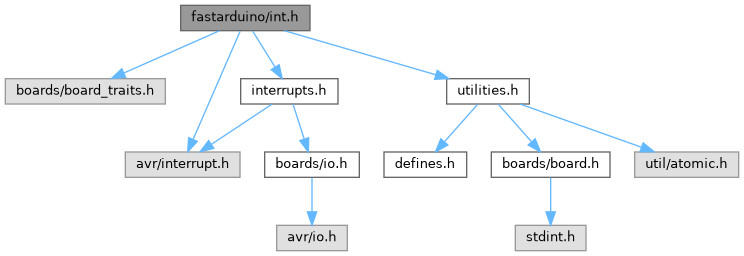
Go to the source code of this file.
Classes | |
| class | interrupt::INTSignal< EXTPIN_ > |
| Handler of an External Interrupt. More... | |
Namespaces | |
| namespace | board |
| Defines all types and constants specific to support a specific MCU target. | |
| namespace | interrupt |
| Defines API to handle AVR interruptions. | |
Macros | |
| #define | REGISTER_INT_ISR_METHOD(INT_NUM, PIN, HANDLER, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for an External Interrupt pin. | |
| #define | REGISTER_INT_ISR_FUNCTION(INT_NUM, PIN, CALLBACK) |
| Register the necessary ISR (Interrupt Service Routine) for an External Interrupt pin. | |
| #define | REGISTER_INT_ISR_EMPTY(INT_NUM, PIN) |
| Register an empty ISR (Interrupt Service Routine) for an External Interrupt pin. | |
| #define | DECL_INT_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_INT_ISR_METHOD. | |
Enumerations | |
| enum class | interrupt::InterruptTrigger : uint8_t { interrupt::LOW_LEVEL = 0x00 , interrupt::ANY_CHANGE = 0x55 , interrupt::FALLING_EDGE = 0xAA , interrupt::RISING_EDGE = 0xFF } |
| Kind of change that will trigger an External Interrupt for a given pin. More... | |
Functions | |
| template<ExternalInterruptPin EXT> | |
| constexpr DigitalPin | board::EXT_PIN () |
Convert an ExternalInterruptPin to the matching DigitalPin. | |
Detailed Description
General API for handling External Interrupt pins.
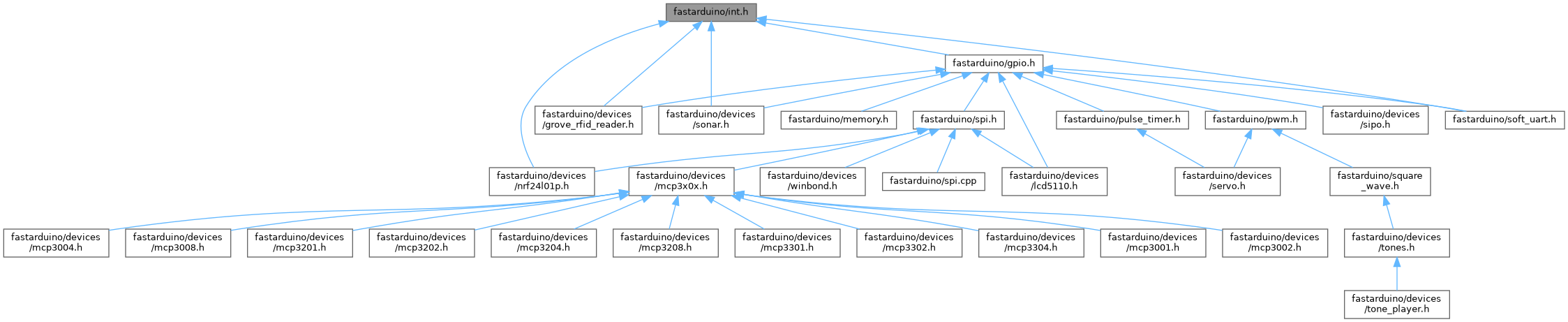
Definition in file int.h.
Macro Definition Documentation
◆ REGISTER_INT_ISR_METHOD
| #define REGISTER_INT_ISR_METHOD | ( | INT_NUM, | |
| PIN, | |||
| HANDLER, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for an External Interrupt pin.
- Parameters
-
INT_NUM the number of the INTvector for thisPINPIN the board::ExternalInterruptPinforINT_NUM; ifPINandINT_NUMdo not match, compilation will fail.HANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when the interrupt is triggered; this must be a proper PTMF (pointer to member function).
◆ REGISTER_INT_ISR_FUNCTION
| #define REGISTER_INT_ISR_FUNCTION | ( | INT_NUM, | |
| PIN, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for an External Interrupt pin.
- Parameters
-
INT_NUM the number of the INTvector for thisPINPIN the board::ExternalInterruptPinforINT_NUM; ifPINandINT_NUMdo not match, compilation will fail.CALLBACK the function that will be called when the interrupt is triggered
◆ REGISTER_INT_ISR_EMPTY
| #define REGISTER_INT_ISR_EMPTY | ( | INT_NUM, | |
| PIN | |||
| ) |
Register an empty ISR (Interrupt Service Routine) for an External Interrupt pin.
This can be useful if you just need to wake up the MCU from an external signal, but do not need to perform any sepcific stuff with a callback.
- Parameters
-
INT_NUM the number of the INTvector for thisPINPIN the board::ExternalInterruptPinforINT_NUM; ifPINandINT_NUMdo not match, compilation will fail.
◆ DECL_INT_ISR_HANDLERS_FRIEND
| #define DECL_INT_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by REGISTER_INT_ISR_METHOD.
It declares the class where it is used as a friend of all necessary functions so that the private callback method can be called properly.