API to handle ultrasonic distance rangers (aka "sonar") such as the HC-SR04. More...
#include <fastarduino/boards/board.h>#include <fastarduino/gpio.h>#include <fastarduino/time.h>#include <fastarduino/realtime_timer.h>#include <fastarduino/utilities.h>#include <fastarduino/int.h>#include <fastarduino/pci.h>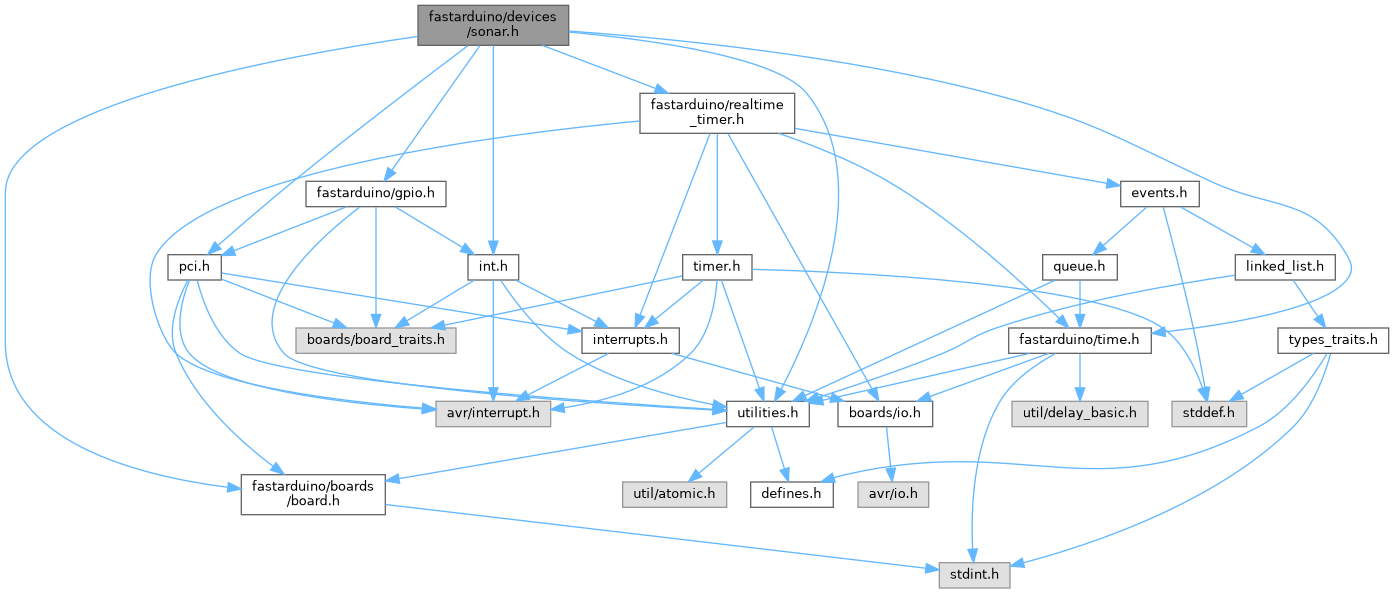
Go to the source code of this file.
Classes | |
| class | devices::sonar::AbstractSonar< NTIMER_ > |
| An abstract base class for some sonar classes defined as part of this API. More... | |
| class | devices::sonar::HCSR04< NTIMER_, TRIGGER_, ECHO_, SONAR_TYPE_ > |
| struct | devices::sonar::SonarEvent< NTIMER_ > |
This type holds information about events occurring within MultiHCSR04 handler. More... | |
| class | devices::sonar::MultiHCSR04< NTIMER_, TRIGGER_, ECHO_PORT_, ECHO_MASK_ > |
This template class supports up to 8 HC-SR04 sonars (or equivalent sensors), with their trigger pins gathered and connected to only one MCU pin, and all echo pins connected to the same MCU board::Port. More... | |
Namespaces | |
| namespace | devices |
| Defines all API for all external devices supported by FastArduino. | |
| namespace | devices::sonar |
| Defines the API for sonar support. | |
Macros | |
| #define | REGISTER_HCSR04_INT_ISR(TIMER, INT_NUM, TRIGGER, ECHO) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::ExternalInterruptPin. | |
| #define | REGISTER_HCSR04_PCI_ISR(TIMER, PCI_NUM, TRIGGER, ECHO, ...) |
Register the necessary ISR (Interrupt Service Routine) for a set of several devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::InterruptPin. | |
| #define | SONAR_PINS(TRIGGER, ECHO) devices::sonar::isr_handler::TriggerEcho<TRIGGER, ECHO> |
Macro used to build proper arguments for REGISTER_DISTINCT_HCSR04_PCI_ISR(). | |
| #define | REGISTER_DISTINCT_HCSR04_PCI_ISR(TIMER, PCI_NUM, SONAR_PINS1, ...) |
Register the necessary ISR (Interrupt Service Routine) for a set of several devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::InterruptPin. | |
| #define | REGISTER_HCSR04_INT_ISR_METHOD(TIMER, INT_NUM, TRIGGER, ECHO, HANDLER, CALLBACK) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::ExternalInterruptPin, and call back a handler's method if the sonar has finished receiving the echo pulse. | |
| #define | REGISTER_HCSR04_INT_ISR_FUNCTION(TIMER, INT_NUM, TRIGGER, ECHO, CALLBACK) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::ExternalInterruptPin, along with a callback function that will be notified when the sonar has finished receiving the echo pulse. | |
| #define | REGISTER_HCSR04_PCI_ISR_METHOD(TIMER, PCI_NUM, TRIGGER, ECHO, HANDLER, CALLBACK) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::InterruptPin, and call back a handler's method if the sonar has finished receiving the echo pulse. | |
| #define | REGISTER_HCSR04_PCI_ISR_FUNCTION(TIMER, PCI_NUM, TRIGGER, ECHO, CALLBACK) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::InterruptPin, along with a callback function that will be notified when the sonar has finished receiving the echo pulse. | |
| #define | REGISTER_HCSR04_RTT_TIMEOUT(TIMER_NUM, SONAR, ...) |
Register the necessary ISR (Interrupt Service Routine) for a set of devices::sonar::HCSR04 to be notified when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update. | |
| #define | REGISTER_HCSR04_RTT_TIMEOUT_METHOD(TIMER_NUM, HANDLER, CALLBACK, SONAR, ...) |
Register the necessary ISR (Interrupt Service Routine) for a set of devices::sonar::HCSR04 to be notified, and call back a handler's method, when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update. | |
| #define | REGISTER_HCSR04_RTT_TIMEOUT_FUNCTION(TIMER_NUM, CALLBACK, SONAR, ...) |
Register the necessary ISR (Interrupt Service Routine) for a set of devices::sonar::HCSR04 to be notified, and call back a function, when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update. | |
| #define | REGISTER_MULTI_HCSR04_PCI_ISR_METHOD(TIMER, PCI_NUM, TRIGGER, ECHO_PORT, ECHO_MASK, HANDLER, CALLBACK) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to listen to echo pulses on all sonars connected to it, and call back a handler's method. | |
| #define | REGISTER_MULTI_HCSR04_PCI_ISR_FUNCTION(TIMER, PCI_NUM, TRIGGER, ECHO_PORT, ECHO_MASK, CALLBACK) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to listen to echo pulses on all sonars connected to it, and call back a function. | |
| #define | REGISTER_MULTI_HCSR04_RTT_TIMEOUT_METHOD(TIMER_NUM, SONAR, HANDLER, CALLBACK) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to be notified, and call back a handler's method, when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update. | |
| #define | REGISTER_MULTI_HCSR04_RTT_TIMEOUT_FUNCTION(TIMER_NUM, SONAR, CALLBACK) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to be notified, and call back a function, when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update. | |
| #define | REGISTER_MULTI_HCSR04_RTT_TIMEOUT_TRIGGER_METHOD(TIMER_NUM, SONAR, HANDLER, CB_TIMEOUT, CB_RTT) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to be notified, and call back one of two handler's methods, for each of the following events: | |
| #define | REGISTER_MULTI_HCSR04_RTT_TIMEOUT_TRIGGER_FUNCTION(TIMER_NUM, SONAR, CB_TIMEOUT, CB_RTT) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to be notified, and call back one of two functions, for each of the following events: | |
| #define | DECL_SONAR_ISR_HANDLERS_FRIEND |
| This macro shall be used in a class containing a private callback method, registered by one (or more) of: | |
Typedefs | |
| template<board::Timer NTIMER_, board::DigitalPin TRIGGER_, board::DigitalPin ECHO_> | |
| using | devices::sonar::BLOCKING_HCSR04 = HCSR04< NTIMER_, TRIGGER_, ECHO_, SonarType::BLOCKING > |
| This template class supports one HC-SR04 sonar (or equivalent sensor), connected to the MCU via 2 pins. | |
| template<board::Timer NTIMER_, board::DigitalPin TRIGGER_, board::ExternalInterruptPin ECHO_> | |
| using | devices::sonar::ASYNC_INT_HCSR04 = HCSR04< NTIMER_, TRIGGER_, board::EXT_PIN< ECHO_ >(), SonarType::ASYNC_INT > |
| This template class supports one HC-SR04 sonar (or equivalent sensor), connected to the MCU via 2 pins. | |
| template<board::Timer NTIMER_, board::DigitalPin TRIGGER_, board::InterruptPin ECHO_> | |
| using | devices::sonar::ASYNC_PCINT_HCSR04 = HCSR04< NTIMER_, TRIGGER_, board::PCI_PIN< ECHO_ >(), SonarType::ASYNC_PCINT > |
| This template class supports one HC-SR04 sonar (or equivalent sensor), connected to the MCU via 2 pins. | |
Enumerations | |
| enum class | devices::sonar::SonarType : uint8_t { devices::sonar::BLOCKING , devices::sonar::ASYNC_INT , devices::sonar::ASYNC_PCINT } |
This enum defines the different modes, supported by HCSR04, to calculate the echo pin pulse duration. More... | |
Functions | |
| static constexpr uint16_t | devices::sonar::echo_us_to_distance_mm (uint16_t echo_us) |
| This method converts the echo duration, in microseconds, to the distance between the sensor and the reflecting obstacle, in millimeters. | |
| static constexpr uint16_t | devices::sonar::distance_mm_to_echo_us (uint16_t distance_mm) |
| This method converts the disatnce, in millimeters, between the sensor and a reflecting object, into the expected echo duration, in microseconds. | |
Variables | |
| static constexpr const uint32_t | devices::sonar::SPEED_OF_SOUND = 340UL |
| The approximate speed of sound (and ultrasonic) waves, in the air, expressed in meters per second. | |
Detailed Description
API to handle ultrasonic distance rangers (aka "sonar") such as the HC-SR04.
Definition in file sonar.h.
Macro Definition Documentation
◆ REGISTER_HCSR04_INT_ISR
| #define REGISTER_HCSR04_INT_ISR | ( | TIMER, | |
| INT_NUM, | |||
| TRIGGER, | |||
| ECHO | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::ExternalInterruptPin.
- Parameters
-
TIMER the board::Timertype used to instantiate thedevices::sonar::HCSR04template class.INT_NUM the number of the INTvector for theboard::ExternalInterruptPinconnected to the echo pinTRIGGER the board::DigitalPinconnected to the sonar trigger pinECHO the board::ExternalInterruptPinconnected to the sonar echo pin
- See also
- devices::sonar::HCSR04
◆ REGISTER_HCSR04_PCI_ISR
| #define REGISTER_HCSR04_PCI_ISR | ( | TIMER, | |
| PCI_NUM, | |||
| TRIGGER, | |||
| ECHO, | |||
| ... | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a set of several devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::InterruptPin.
This macro supports registration of an ISR for several HCSR04, sharing one single trigger pin, and having all echo pins on the same port.
- Parameters
-
TIMER the board::Timertype used to instantiate thedevices::sonar::HCSR04template class.PCI_NUM the number of the PCINTvector for theboard::InterruptPinconnected to the echo pinTRIGGER the board::DigitalPinconnected to the sonar trigger pinECHO the board::InterruptPinconnected to the sonar echo pin... other echo pins for other HCSR04
◆ SONAR_PINS
| #define SONAR_PINS | ( | TRIGGER, | |
| ECHO | |||
| ) | devices::sonar::isr_handler::TriggerEcho<TRIGGER, ECHO> |
Macro used to build proper arguments for REGISTER_DISTINCT_HCSR04_PCI_ISR().
Each constructed argument is actually a pair of pins, one board::DigitalPin (the trigger pin of the sonar), one board::InterruptPin (the echo pin of the sonar).
- Parameters
-
TRIGGER the board::DigitalPinconnected to the trigger pin of the sonarECHO the board::InterruptPinconnected to the echo pin of the sonar
◆ REGISTER_DISTINCT_HCSR04_PCI_ISR
| #define REGISTER_DISTINCT_HCSR04_PCI_ISR | ( | TIMER, | |
| PCI_NUM, | |||
| SONAR_PINS1, | |||
| ... | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a set of several devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::InterruptPin.
This macro supports registration of an ISR for several HCSR04, using distinct trigger pins, but having all echo pins on the same port.
- Parameters
-
TIMER the board::Timertype used to instantiate thedevices::sonar::HCSR04template class.PCI_NUM the number of the PCINTvector for theboard::InterruptPinconnected to the echo pinSONAR_PINS1 the pair of pins connected to the 1st sonar; this is a specific type, created by SONAR_PINS()macro.... other pairs of (trigger pin, echo pin) for other HCSR04
◆ REGISTER_HCSR04_INT_ISR_METHOD
| #define REGISTER_HCSR04_INT_ISR_METHOD | ( | TIMER, | |
| INT_NUM, | |||
| TRIGGER, | |||
| ECHO, | |||
| HANDLER, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::ExternalInterruptPin, and call back a handler's method if the sonar has finished receiving the echo pulse.
- Parameters
-
TIMER the board::Timertype used to instantiate thedevices::sonar::HCSR04template class.INT_NUM the number of the INTvector for theboard::ExternalInterruptPinconnected to the echo pinTRIGGER the board::DigitalPinconnected to the sonar trigger pinECHO the board::ExternalInterruptPinconnected to the sonar echo pinHANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when the sonar has received the echo pulse; this must be a proper PTMF (pointer to member function).
◆ REGISTER_HCSR04_INT_ISR_FUNCTION
| #define REGISTER_HCSR04_INT_ISR_FUNCTION | ( | TIMER, | |
| INT_NUM, | |||
| TRIGGER, | |||
| ECHO, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::ExternalInterruptPin, along with a callback function that will be notified when the sonar has finished receiving the echo pulse.
- Parameters
-
TIMER the board::Timertype used to instantiate thedevices::sonar::HCSR04template class.INT_NUM the number of the INTvector for theboard::ExternalInterruptPinconnected to the echo pinTRIGGER the board::DigitalPinconnected to the sonar trigger pinECHO the board::ExternalInterruptPinconnected to the sonar echo pinCALLBACK the function that will be called when the sonar has received the echo pulse
◆ REGISTER_HCSR04_PCI_ISR_METHOD
| #define REGISTER_HCSR04_PCI_ISR_METHOD | ( | TIMER, | |
| PCI_NUM, | |||
| TRIGGER, | |||
| ECHO, | |||
| HANDLER, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::InterruptPin, and call back a handler's method if the sonar has finished receiving the echo pulse.
- Parameters
-
TIMER the board::Timertype used to instantiate thedevices::sonar::HCSR04template class.PCI_NUM the number of the PCINTvector for theboard::InterruptPinconnected to the echo pinTRIGGER the board::DigitalPinconnected to the sonar trigger pinECHO the board::InterruptPinconnected to the sonar echo pinHANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when the sonar has received the echo pulse; this must be a proper PTMF (pointer to member function).
◆ REGISTER_HCSR04_PCI_ISR_FUNCTION
| #define REGISTER_HCSR04_PCI_ISR_FUNCTION | ( | TIMER, | |
| PCI_NUM, | |||
| TRIGGER, | |||
| ECHO, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::HCSR04 to listen to echo pulses when the echo pin is a board::InterruptPin, along with a callback function that will be notified when the sonar has finished receiving the echo pulse.
- Parameters
-
TIMER the board::Timertype used to instantiate thedevices::sonar::HCSR04template class.PCI_NUM the number of the PCINTvector for theboard::InterruptPinconnected to the echo pinTRIGGER the board::DigitalPinconnected to the sonar trigger pinECHO the board::InterruptPinconnected to the sonar echo pinCALLBACK the function that will be called when the sonar has received the echo pulse
◆ REGISTER_HCSR04_RTT_TIMEOUT
| #define REGISTER_HCSR04_RTT_TIMEOUT | ( | TIMER_NUM, | |
| SONAR, | |||
| ... | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a set of devices::sonar::HCSR04 to be notified when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU SONAR the actual type of the first sonar to notify (instantiated template of devices::sonar::HCSR04)... the actual types of other sonars to notify
- See also
- devices::sonar::HCSR04
- HCSR04::echo_us()
- HCSR04::await_echo_us()
- HCSR04::async_echo()
- REGISTER_RTT_ISR()
◆ REGISTER_HCSR04_RTT_TIMEOUT_METHOD
| #define REGISTER_HCSR04_RTT_TIMEOUT_METHOD | ( | TIMER_NUM, | |
| HANDLER, | |||
| CALLBACK, | |||
| SONAR, | |||
| ... | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a set of devices::sonar::HCSR04 to be notified, and call back a handler's method, when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU HANDLER the class holding the callback method CALLBACK the function that will be called when the timeout has occurred SONAR the actual type of the first sonar to notify (instantiated template of devices::sonar::HCSR04)... the actual types of other sonars to notify
- See also
- devices::sonar::HCSR04
- HCSR04::echo_us()
- HCSR04::await_echo_us()
- HCSR04::async_echo()
- REGISTER_HCSR04_RTT_TIMEOUT()
◆ REGISTER_HCSR04_RTT_TIMEOUT_FUNCTION
| #define REGISTER_HCSR04_RTT_TIMEOUT_FUNCTION | ( | TIMER_NUM, | |
| CALLBACK, | |||
| SONAR, | |||
| ... | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a set of devices::sonar::HCSR04 to be notified, and call back a function, when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU CALLBACK the function that will be called when the timeout has occurred SONAR the actual type of the first sonar to notify (instantiated template of devices::sonar::HCSR04)... the actual types of other sonars to notify
- See also
- devices::sonar::HCSR04
- HCSR04::echo_us()
- HCSR04::await_echo_us()
- HCSR04::async_echo()
- REGISTER_HCSR04_RTT_TIMEOUT()
◆ REGISTER_MULTI_HCSR04_PCI_ISR_METHOD
| #define REGISTER_MULTI_HCSR04_PCI_ISR_METHOD | ( | TIMER, | |
| PCI_NUM, | |||
| TRIGGER, | |||
| ECHO_PORT, | |||
| ECHO_MASK, | |||
| HANDLER, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to listen to echo pulses on all sonars connected to it, and call back a handler's method.
- Parameters
-
TIMER the board::Timertype used to instantiate thedevices::sonar::MultiHCSR04template class.PCI_NUM the number of the PCINTvector for theboard::InterruptPinconnected to the echo pinTRIGGER the board::DigitalPinconnected to the sonars trigger pinsECHO_PORT the board::Portconnected to all sonar echo pinsECHO_MASK the mask to apply to ECHO_PORTto define which pins of this port are connected to a sonarHANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when one sonar echo pin changes level, i.e. when a leading or trailing edge of the echo pulse is received; this must be a proper PTMF (pointer to member function) which takes one argument of typeconst SonarEvent<TIMER>&.
◆ REGISTER_MULTI_HCSR04_PCI_ISR_FUNCTION
| #define REGISTER_MULTI_HCSR04_PCI_ISR_FUNCTION | ( | TIMER, | |
| PCI_NUM, | |||
| TRIGGER, | |||
| ECHO_PORT, | |||
| ECHO_MASK, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to listen to echo pulses on all sonars connected to it, and call back a function.
- Parameters
-
TIMER the board::Timertype used to instantiate thedevices::sonar::MultiHCSR04template class.PCI_NUM the number of the PCINTvector for theboard::InterruptPinconnected to the echo pinTRIGGER the board::DigitalPinconnected to the sonars trigger pinsECHO_PORT the board::Portconnected to all sonar echo pinsECHO_MASK the mask to apply to ECHO_PORTto define which pins of this port are connected to a sonarCALLBACK the function that will be called when one sonar echo pin changes level, i.e. when a leading or trailing edge of the echo pulse is received; this must take one argument of type const SonarEvent<TIMER>&.
◆ REGISTER_MULTI_HCSR04_RTT_TIMEOUT_METHOD
| #define REGISTER_MULTI_HCSR04_RTT_TIMEOUT_METHOD | ( | TIMER_NUM, | |
| SONAR, | |||
| HANDLER, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to be notified, and call back a handler's method, when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU SONAR the actual type of the devices::sonar::MultiHCSR04for which this ISR is registeredHANDLER the class holding the callback method CALLBACK the method of HANDLERthat will be called when a timeout occurs; this must be a proper PTMF (pointer to member function) which takes one argument of typeconst SonarEvent<TIMER>&.
◆ REGISTER_MULTI_HCSR04_RTT_TIMEOUT_FUNCTION
| #define REGISTER_MULTI_HCSR04_RTT_TIMEOUT_FUNCTION | ( | TIMER_NUM, | |
| SONAR, | |||
| CALLBACK | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to be notified, and call back a function, when a timeout occurs; this ISR is also in charge of the associated timer::RTT time update.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU SONAR the actual type of the devices::sonar::MultiHCSR04for which this ISR is registeredCALLBACK the function that will be called when a timeout occurs; this must take one argument of type const SonarEvent<TIMER>&.
◆ REGISTER_MULTI_HCSR04_RTT_TIMEOUT_TRIGGER_METHOD
| #define REGISTER_MULTI_HCSR04_RTT_TIMEOUT_TRIGGER_METHOD | ( | TIMER_NUM, | |
| SONAR, | |||
| HANDLER, | |||
| CB_TIMEOUT, | |||
| CB_RTT | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to be notified, and call back one of two handler's methods, for each of the following events:
- a range timeout occurs
- the associated
timer::RTTis updated (one ms elapsed) This ISR is also in charge of the associatedtimer::RTTtime update.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU SONAR the actual type of the devices::sonar::MultiHCSR04for which this ISR is registeredHANDLER the class holding the callback method CB_TIMEOUT the method of HANDLERthat will be called when a timeout occurs; this must be a proper PTMF (pointer to member function) which takes one argument of typeconst SonarEvent<TIMER>&.CB_RTT the method of HANDLERthat will be called when the associatedtimer::RTTis updated; this must be a proper PTMF (pointer to member function) which takes no argument. This is typically used byHANDLERto retrigger sonars ranging on a periodic basis.
◆ REGISTER_MULTI_HCSR04_RTT_TIMEOUT_TRIGGER_FUNCTION
| #define REGISTER_MULTI_HCSR04_RTT_TIMEOUT_TRIGGER_FUNCTION | ( | TIMER_NUM, | |
| SONAR, | |||
| CB_TIMEOUT, | |||
| CB_RTT | |||
| ) |
Register the necessary ISR (Interrupt Service Routine) for a devices::sonar::MultiHCSR04 to be notified, and call back one of two functions, for each of the following events:
- a range timeout occurs
- the associated
timer::RTTis updated (one ms elapsed) This ISR is also in charge of the associatedtimer::RTTtime update.
- Parameters
-
TIMER_NUM the number of the TIMER feature for the target MCU SONAR the actual type of the devices::sonar::MultiHCSR04for which this ISR is registeredCB_TIMEOUT the function that will be called when a timeout occurs; this must take one argument of type const SonarEvent<TIMER>&.CB_RTT the function that will be called when the associated timer::RTTis updated; this must take no argument. This is typically used to retrigger sonars ranging on a periodic basis.
◆ DECL_SONAR_ISR_HANDLERS_FRIEND
| #define DECL_SONAR_ISR_HANDLERS_FRIEND |
This macro shall be used in a class containing a private callback method, registered by one (or more) of:
REGISTER_HCSR04_INT_ISR_METHODREGISTER_HCSR04_PCI_ISR_METHODREGISTER_HCSR04_RTT_TIMEOUT_METHODREGISTER_MULTI_HCSR04_PCI_ISR_METHODREGISTER_MULTI_HCSR04_RTT_TIMEOUT_METHOD
It declares the class where it is used as a friend of all necessary functions so that the private callback method can be called properly.