Loading...
Searching...
No Matches
mpu6050.h File Reference
API to handle MPU6050 3-axis gyroscope/accelerometer I2C chip. More...
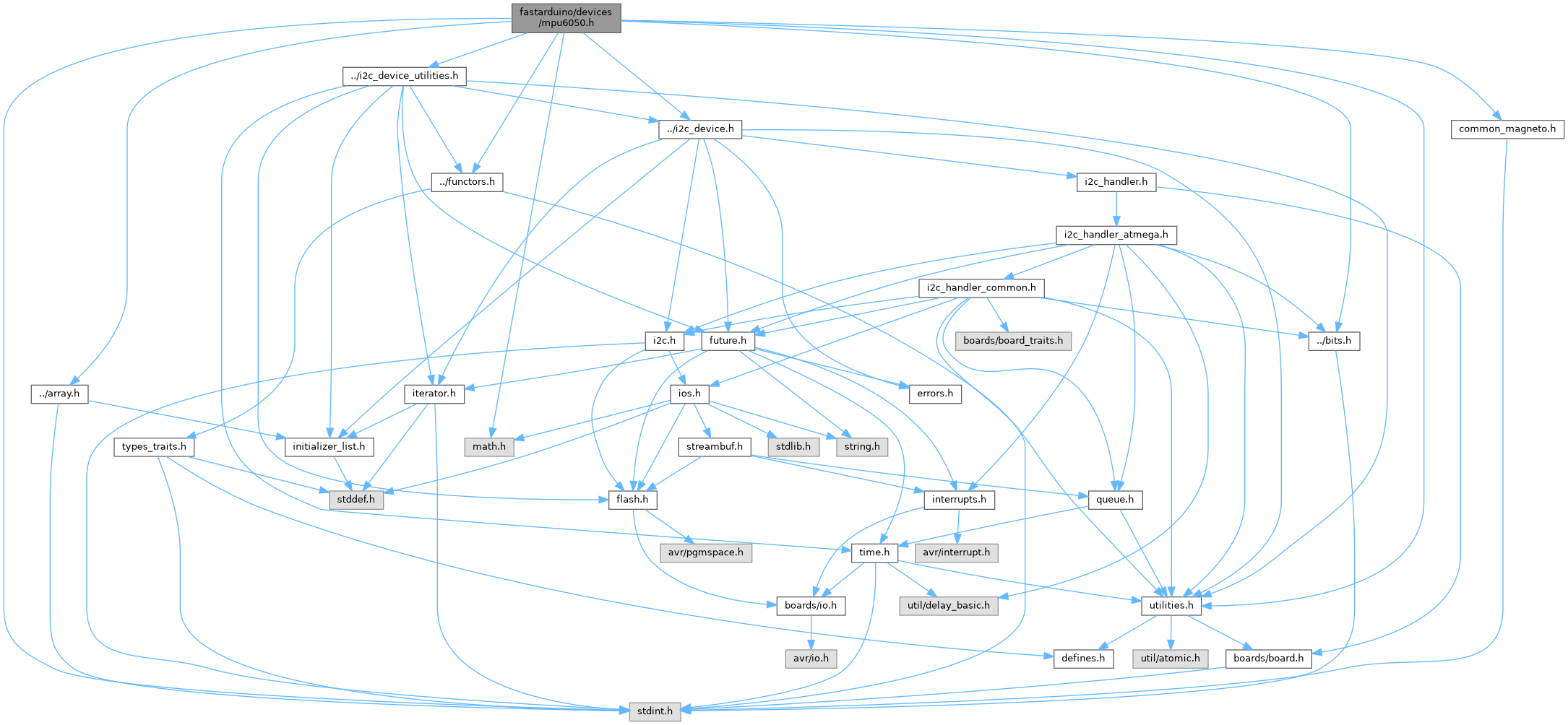
#include <math.h>#include <stdint.h>#include "common_magneto.h"#include "../array.h"#include "../bits.h"#include "../functors.h"#include "../i2c_device.h"#include "../i2c_device_utilities.h"#include "../utilities.h"
Include dependency graph for mpu6050.h:
Go to the source code of this file.
Classes | |
| class | devices::magneto::FIFOEnable |
| Configuration for MPU6050 FIFO Enable register (register map §4.6). More... | |
| class | devices::magneto::INTStatus |
| The structure of the Interrupt Status register (register map §4.16). More... | |
| struct | devices::magneto::AllSensors |
| Structure to store all MPU6050 sensors data (3 axis gyroscope and accelerometer, chip temperature). More... | |
| class | devices::magneto::MPU6050< MANAGER > |
| I2C device driver for the MPU6050 gyroscope/accelerometer chip. More... | |
| class | devices::magneto::MPU6050< MANAGER >::BeginFuture |
| Create a future to be used by asynchronous method begin(BeginFuture&). More... | |
| class | devices::magneto::MPU6050< MANAGER >::FifoBeginFuture |
| Create a future to be used by asynchronous method begin(FifoBeginFuture&). More... | |
| class | devices::magneto::MPU6050< MANAGER >::EndFuture |
| Create a future to be used by asynchronous method end(EndFuture&). More... | |
| class | devices::magneto::MPU6050< MANAGER >::ResetFuture |
| Create a future to be used by asynchronous method reset(ResetFuture&). More... | |
Namespaces | |
| namespace | devices |
| Defines all API for all external devices supported by FastArduino. | |
| namespace | devices::magneto |
| Defines API for magnetic sensors for direction, speed and acceleration properties. | |
Typedefs | |
| using | devices::magneto::INTEnable = INTStatus |
| The structure of the Interrupt Enable register (register map §4.15). | |
Enumerations | |
| enum class | devices::magneto::GyroRange : uint8_t { RANGE_250 = 0 << 3 , RANGE_500 = 1 << 3 , RANGE_1000 = 2 << 3 , RANGE_2000 = 3 << 3 } |
| The full-scale range of the gyroscope in dps (datasheet §6.1). More... | |
| enum class | devices::magneto::AccelRange : uint8_t { RANGE_2G = 0 << 3 , RANGE_4G = 1 << 3 , RANGE_8G = 2 << 3 , RANGE_16G = 3 << 3 } |
| The full-scale range of the accelerometer in g (datasheet §6.2). More... | |
| enum class | devices::magneto::ClockSelect : uint8_t { INTERNAL_8MHZ = 0 , PLL_X_AXIS_GYRO = 1 , PLL_Y_AXIS_GYRO = 2 , PLL_Z_AXIS_GYRO = 3 , PLL_EXTERNAL_32KHZ = 4 , PLL_EXTERNAL_19MHZ = 5 , STOPPED = 7 } |
| The clock to select for the chip (datasheet §6.6). More... | |
| enum class | devices::magneto::DLPF : uint8_t { ACCEL_BW_260HZ = 0 , ACCEL_BW_184HZ = 1 , ACCEL_BW_94HZ = 2 , ACCEL_BW_44HZ = 3 , ACCEL_BW_21HZ = 4 , ACCEL_BW_10HZ = 5 , ACCEL_BW_5HZ = 6 , GYRO_BW_256HZ = 0 , GYRO_BW_188HZ = 1 , GYRO_BW_98HZ = 2 , GYRO_BW_42HZ = 3 , GYRO_BW_20HZ = 4 , GYRO_BW_10HZ = 5 , GYRO_BW_5HZ = 6 } |
| The Digital Low Pass Filter bandwidth to select for the chip (register map §4.3). More... | |
| enum class | devices::magneto::AD0 : uint8_t { devices::magneto::LOW = 0 , devices::magneto::HIGH = 1 } |
| Possible values of I2C address lower bit for the chip (the chip may have one of two possible addresses, based on the level of pin AD0, datasheet §6.4, §7.1). More... | |
Functions | |
| static constexpr uint16_t | devices::magneto::GYRO_RANGE_DPS (GyroRange range) |
Convert a GyroRange constant to the real gyroscope range in dps. | |
| static constexpr uint16_t | devices::magneto::ACCEL_RANGE_G (AccelRange range) |
Convert an AccelRange constant to the real accelerometer range in g. | |
Detailed Description
API to handle MPU6050 3-axis gyroscope/accelerometer I2C chip.
- See also
- https://github.com/jfpoilpret/fast-arduino-lib/blob/master/refs/devices/MPU-6000-Datasheet1.pdf
- https://github.com/jfpoilpret/fast-arduino-lib/blob/master/refs/devices/MPU-6000-Register-Map1.pdf
Definition in file mpu6050.h.